POSIBLOC™
Le système POSIBLOC™ a été développé par ARTELIA et ses partenaires. Il est commercialisé par MESURIS.

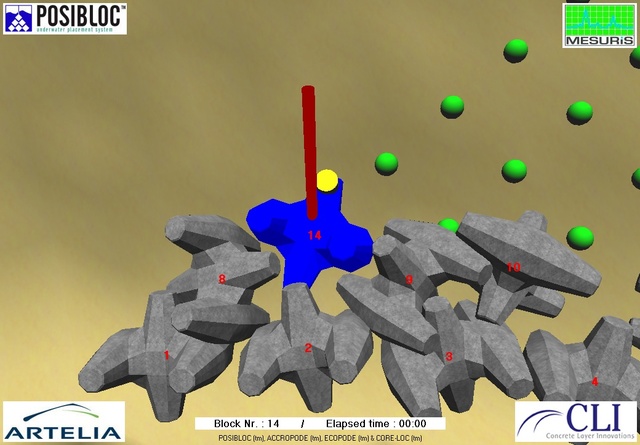
Le principe POSIBLOC™ est basé sur la mesure. Il fonctionne avec un logiciel de visualisation virtuelle 3D VISIBLOC™ qui permet de visualiser en temps réel les informations fournies par l’appareillage de mesure.
Le logiciel VISIBLOC PROCESSING peut être utilisé après la pose pour réaliser diverses opérations et manipulations à partir des datas collectées. Les informations sur l´attitude du bloc sont transmises à l´ordinateur par un câble relié à un sensor fixé sur le bloc en béton par des chevilles en plastique.
La précision est + ou – 0,15 mètre.
Nos inspecteurs ont travaillé avec le système POSIBLOC™ sur les chantiers de RAS LAFFAN au QATAR avec le bloc ACCROPODE™, KHALIFA à ABU DHABI avec le bloc ACCROPODE™, BARAKAH à ABU DHABI avec les blocs CORELOC™ et ALFAW en IRAK avec les blocs CORELOC™.
Le système POSIBLOC™ permet le suivi dynamique en temps réel du bloc en cours de pose. Les autres blocs sont visualisés à l’écran dans la position où ils ont été enregistrés.
CLAS a fait une évaluation complète de POSIBLOC™ en Août 2017.
Un inspecteur de CLAS est resté un mois complet sur le chantier de ALFAW en IRAK où trois POSIBLOC™ doivent être mis en œuvre. Nous avons constaté une amélioration du système par rapport à ce que nous avions vu sur les projets de RAS LAFFAN, KHALIFA et BARAKAH où le système POSIBLOC™ avait été abandonné par les entreprises.
Lors des derniers tests des difficultés sont apparues :
Le logiciel VISIBLOC PROCESING n´a pas permis de calculer correctement les densités de pose et présentait une différence de l´ordre de 2,45% avec le calcul fait par AUTOCAD en utilisant les mêmes datas.
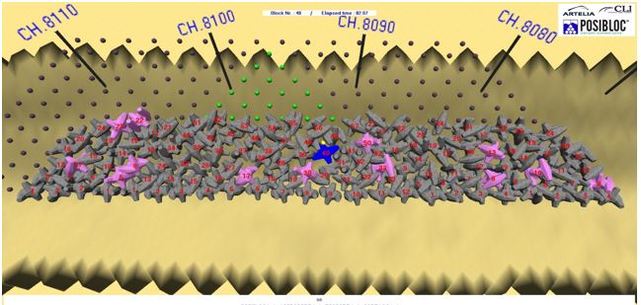
Le logiciel VISIBLOC PROCESSING ne permettait pas non plus d´identifier les blocs hors profils. Il présentait une grande quantité de blocs hors profils qui ne l´étaient pas.
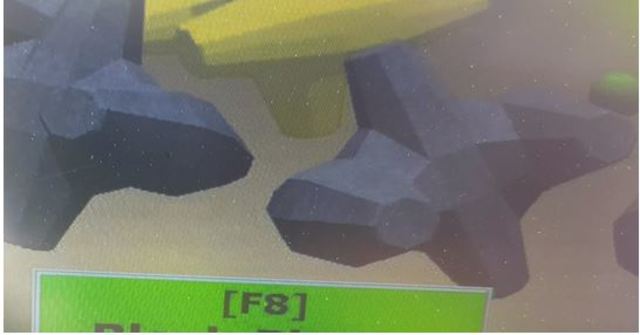
Sur le logiciel VISIBLOC PROCESSING les CORELOC™
Indiqués en rose sont supposés hors profils alors qu’en réalité il y en avait seulement 1
L´imbrication des blocs n´a pas pu être appréciée parce que le logiciel montre des défauts d´imbrication qui n´existent pas ou ne montre pas des défauts d´imbrication qui existent.
CORELOC™ correctement imbriqué à l’écran mais pas imbriqué en réalité (photos prises au même moment)
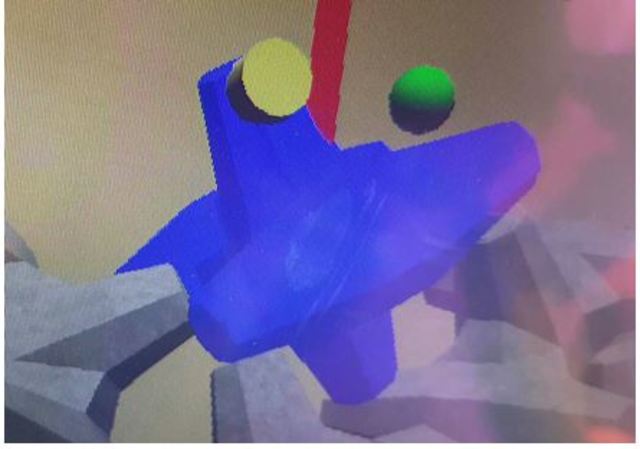

Le même CORELOC™ pas correctement imbriqué à l’écran mais bien pose en réalité (photos prises au même moment)

Le système POSIBLOC™ et ses logiciels n´ont pas permis d´identifier les blocs cassés. Le sensor de poids est destiné à régler la tension du câble au moment de l´enregistrement des datas. Il n´est pas conçu pour apprécier le poids dans l´eau sachant que la limite de rupture acceptée par CLI est 2% sur le CORELOC™.
Les trous réels n´étaient pas toujours indiqués sur le logiciel VISIBLOC™. Le logiciel indiquait aussi des trous qui n´existaient pas.
Des défauts de contacts avec la sous-couche n’ont pas été indiqués sur le logiciel.
Tous ces problèmes ont été signalés à MESURIS et à CLI mais n´avaient pas été solutionnés quand l´inspecteur de CLAS a quitté le projet après un mois de tests.
Nous recommandons de ne pas utiliser le système POSIBLOC™ pour approuver la pose des blocs ACCROPODE™, ACCROPODE™II, ECOPODE™, CORELOC™ ou X-bloc®.
Le logiciel VISIBLOC-PROCESING permet de modifier la représentation des blocs, que ce soit sur l´orientation ou sur la position réelle. Ce n’est pas compatible avec un outil l’appréciation de la réalité de la construction.
Si vous souhaitez l´utiliser comme outil d´aide à la pose, nous vous recommandons de confier aux inspecteurs de CLAS la mise en œuvre d´une procédure d´évaluation de son efficacité dans le contexte de votre projet.
Les productions fournies par le système POSIBLOC™ que nous avons constatées en 2017 sont comprises entre 3 et 4 unités par heure en approvisionnement continu. Cette faible production s´explique par plusieurs facteurs :
La fixation du sensor sur le béton.
La nécessité de poser doucement pour éviter d´endommager le sensor et son câble.
La nécessité de contrôler les points de contact avec le logiciel de visualisation 3D.
Les informations imprécises ou erronées données par ce logiciel qui dans la majorité des cas impose de lever et reposer le même bloc plusieurs fois.
L´arrachement assez fréquent du sensor qui impose de ressortir le bloc de l´eau pour refixer le sensor.
A chaque tentative de pose il faut de nouveau mettre en œuvre la visualisation 3D.
PRAT DE BAIX EDIFICI F PB3, SOLDEU, AD100 CANILLO
+376 354 698 / +336 161 602 74
e...@clascertification.com
Clas certification - 2018 - Tous droits réservés - Mentions légales - Design : Pygmalis - Intégration : Ingeitec